
Other Projects
LinBot – Design, Analysis, and Field Test of a Novel Power Transmission Lines Inspection Robot
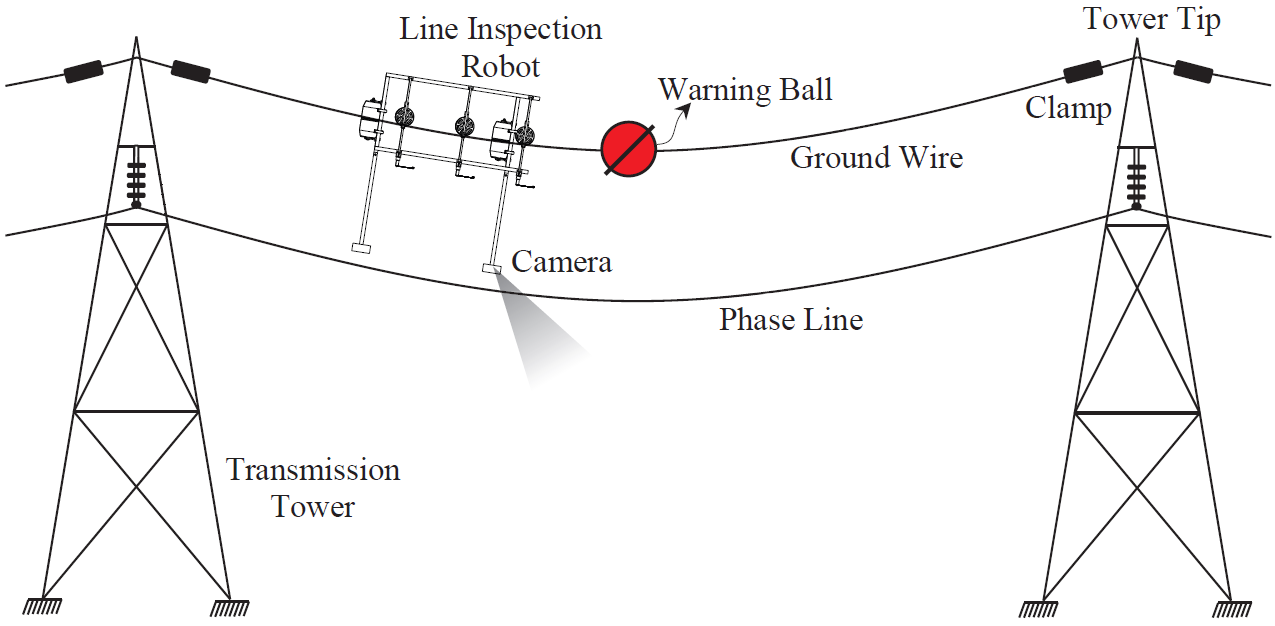
In this research, design, analysis, and field test of an innovative inspection robot (which is named LinBot) for high-voltage power transmission lines are investigated. This robot is utilized for moving on ground wires of transmission lines with the aim of inspection and fault detection of phase lines. Thanks to active and passive mechanisms designed in this robot, it is able to surmount all different ground wire obstacles including warning balls, clamps, and tower tips, and this is a unique capability of this robot among all other line inspection robots. The active mechanisms comprise four vertical rollers attached to the robot chassis by four arms, three horizontal rollers, and six mechanisms to control the vertical position of these horizontal rollers. Moreover, four sets of rotational springs and dampers are located in the joints of vertical rollers arms as passive mechanisms. To validate stability and feasibility of the robot in obstacle surmount and achieve the best selection for the robot required motors, a simulation study in MSC ADAMS software is conducted. The dynamical behavior of the robot including the motors torques is presented based on the simulation results. Furthermore, effect of wind on the stability of the robot is studied. Finally, practical performance of robot prototype manufactured in a laboratory is evaluated in the real field experimentally.
 |  |
Publications:
- A. Fakhari and A. Mostashfi, “LinBot - Design, Analysis, and Field Test of a Novel Power Transmission Lines Inspection Robot,” 2019 7th International Conference on Robotics and Mechatronics (ICRoM), 2019, pp. 132-137, doi: 10.1109/ICRoM48714.2019.9071839.
- A. Mostashfi, A. Fakhari, and M.A. Badri, “Simulation and Experimental Validation of a New Cable Inspection Robot for High Voltage Lines,” Mechanical Engineering Sharif, vol. 31-3, no. 2, pp. 25-32, 2015.
- A. Mostashfi, A. Fakhari, and M.A. Badri, “A Novel Design of Inspection Robot for High-Voltage Power Lines,” Industrial Robot: An International Journal, vol. 41, no. 2, pages 166–175, 2014.
- A. Mostashfi, A. Fakhari, M. Sakkak, M. Sadeghi, and M.A. Badri, “Inspection Robot for High-Voltage Power Lines,” IR Registration No. 81449, Tehran, Iran, Dec. 18, 2013.
Trajectory Planning of Walking with Different Step Lengths of a Seven-Link Biped Robot:
Most of the essential parameters of human walking can be captured with a seven-link planar biped robot. In this project, dynamics modeling and trajectory planning of a seven-link planar biped robot walking on level ground with a ditch or stairs were studied. The hip and foot trajectories were designed in Cartesian space using polynomial interpolation such that to vanish the impact effect of feet with the ground. The key parameters of the hip joint trajectory in the x-axis direction were obtained using boundaries of biped stable region during the walking to satisfy the dynamic stability of the robot. The highest position of the swing foot ankle joint in the x- and z-axis direction was optimized with two different fitness functions. A novel method for trajectory planning of walking with different step lengths, uses for online trajectory planning, was proposed. Moreover, the effectiveness of the proposed method was verified by simulation and experimental results.
Publications:
- A. Fattah and A. Fakhari, “Trajectory Planning of Walking with Different Step Lengths of a Seven-Link Biped Robot,” ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE), Montreal, Quebec, Canada, Aug. 2010.
- A. Fattah, A. Fakhari, and S. Behbahani, “Dynamics Modeling and Trajectory Planning of a Seven-Link Planar Biped Robot,” 17th Annual (International) Conference on Mechanical Engineering (ISME), Tehran, Iran, May 2009.