
Sensor Design
Development of Soft Magnetic Sensors for Tri-Axial Tactile Sensing of Normal and Shear Forces and Contact Localization
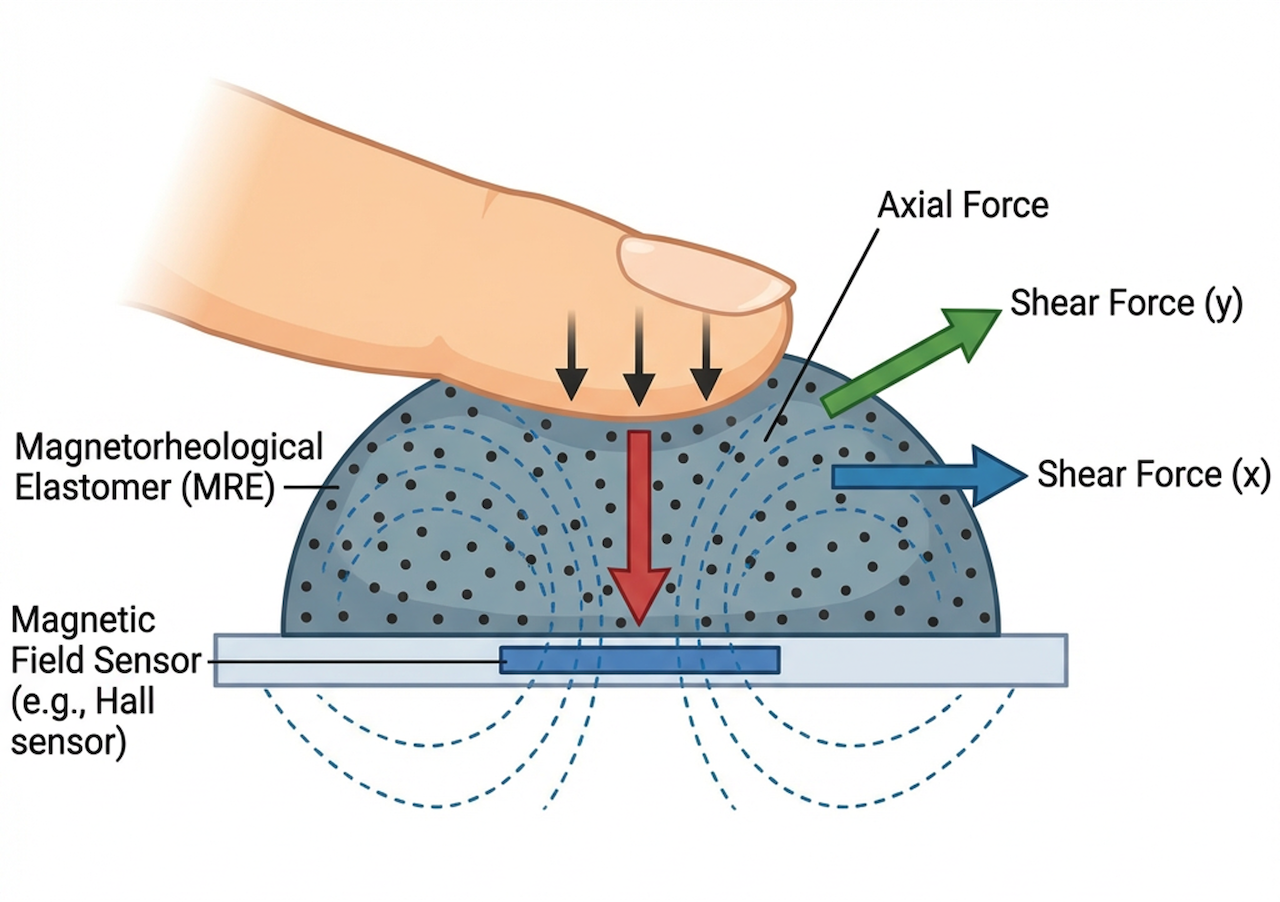
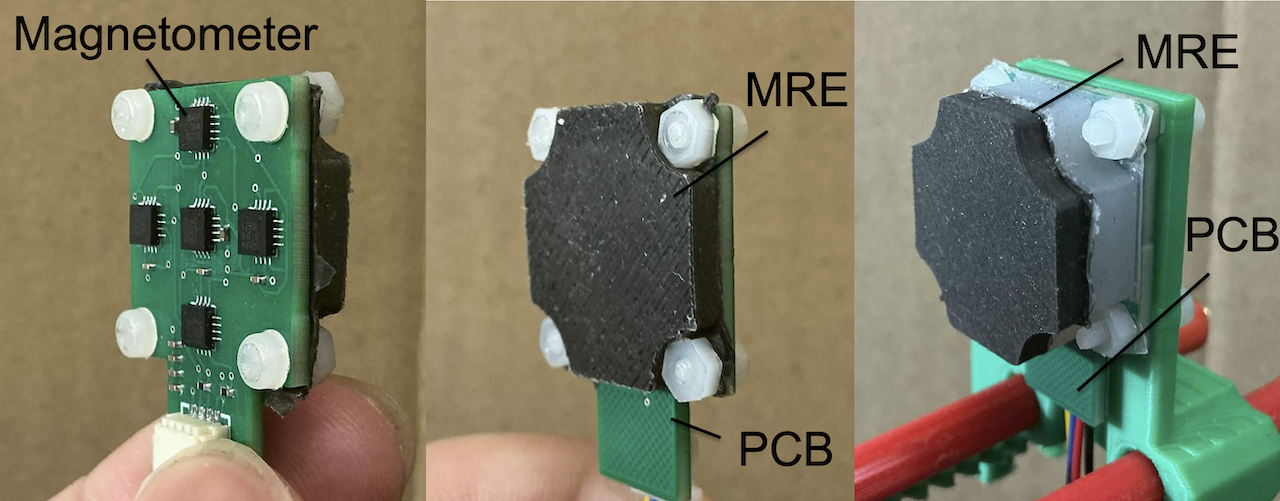
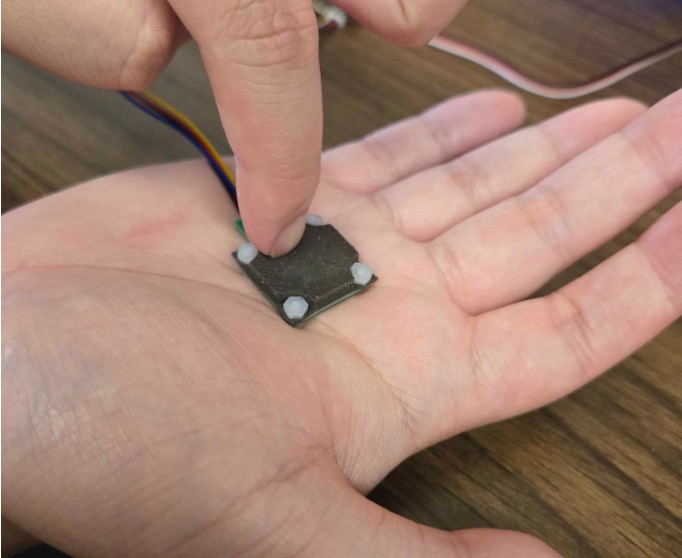
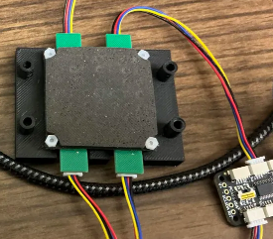
Soft tactile sensors are essential for mimicking human touch, converting physical displacements into electrical signals primarily through optical, capacitive, piezo-resistive, piezo-electric, or magnetic modalities. Specifically, magnetic tactile sensors using a magnetorheological elastomer (MRE) in which magnetized micro-particles are embedded in a soft, deformable polymer matrix provide exceptional sensitivity, durability, and a wide dynamic range for 3D force sensing. In this study, we developed a novel computational framework to map continuous magnetic-flux-density readings from an underlying Hall-effect sensor array into tri-axial signals representing normal and shear forces, and to precisely localize contact points. By accounting for the inherent non-linearities and hysteresis of the elastomer, our processing methodology ensures robust, real-time force feedback. The algorithm can be applied to MREs of varying geometric shapes and thicknesses, demonstrating its versatility across a wide range of applications. Ultimately, the sensor demonstrates accurate tactile perception, allowing the ability to detect slip, localize contact, and maintain stable manipulation of delicate objects.
MS Student: Martin Chan
 |  |
 |  |  |
Thesis:
- Martin Chan, “Development of Soft Magnetic Sensors for Tri-Axial Tactile Sensing of Normal and Shear Forces and Contact Localization,” Department of Mechanical Engineering, Stony Brook University, May 2026.